- Сообщений: 120
- Спасибо получено: 0
×
Коптеры - во всех и всяких их конфигурациях...
Rabbit - система управления и стабилизации - тестим Кролика.
19 сен 2012 08:46 #5069
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Добрый день, в связи с тем что на моделке то не очень хотят помогать, обращусь еще сюда. На плате Кролика не правильно подключил балансировочный разъём, в итоге сгорела плата. Щас на фото воткнут правильно, а я был подсоеденил наоборот, Сгорел еще помоему кондёр на фото ниже, при подключении к юсб светодиоды еле горят, комп плату не видит, можно ли еще как то спасти плату?




Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-

- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-

Меньше
Больше
19 сен 2012 12:59 - 19 сен 2012 13:20 #5070
от sphere_kev
..! You Can Make World Better !..

sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Видел Вашу беду на Моделке.
Я в схемотехнике - не очень, но товарищ разбирается. Задам вопрос ему. Вероятно, можно заменить сгоревшие детали, только надо понять и идентифицировать эти детали.
Могу попробовать дать совет, но:
Далее - Вы все делаете на свой страх и риск, так как плата уже подпалена и последствия включения питания могут быть самые разные. Итак:
0.Отключаете все оборудование от платы кролика.
1. Выдергиваете балансирный разъем - он уже Вам не пригодится в данном состоянии платы. Я тоже не использую контроль батареи. Лучше отдельно на батарею пищалку поставить, а лучше - засечь по таймеру время полета на батарее и не доводить до писка датчика.
2. Берете отдельный ВЕС.

На ВЕСе проверяете - установлена ли перемычка на выдачу 5 вольт(кролику нужно 5 вольт). Запитываете его от 12-вольтового акка(любого).
3. ВНИМАНИЕ! Подача питания таким образом может "допалить" Вашего кролика. Ведь неизвестны последствия от предыдущего замыкания. А может - все пройдет и нормально. Это Ваш риск.
Втыкаете контакты с ВЕСа в кролика, учитывая полярность(ОЧЕНЬ ВНИМАТЕЛЬНО!!!) Если светодиоды вверху, то минус(земля, GND) - внизу. Плюс - в середине. Воткнуть можно(ВНИМАНИЕ!!!!) либо в разъемы для входов с приемника, либо на разъемы выходов на двигатели и сервы. Это два длинных ряда разъемов справа и слева(каждый на 8 каналов).
4.Если воткнули питание и у Вас ничего не бахнуло, а только заморгали светодиоды туда-сюда, то кролик еще живой.
5.Теперь втыкайте ЮСБ шнурок в комп и в кролика.
6.Смотрите - определяется или нет и не горит ли USBпорт компа.
7.Если определился и USB на компе не сгорел - запускаете программу настройки кроля, выбираете необходимый ком-порт и уже занимаетесь настройкой/прошивкой.
Отпишитесь о результатах эксперимента.
Я в схемотехнике - не очень, но товарищ разбирается. Задам вопрос ему. Вероятно, можно заменить сгоревшие детали, только надо понять и идентифицировать эти детали.
Могу попробовать дать совет, но:
Далее - Вы все делаете на свой страх и риск, так как плата уже подпалена и последствия включения питания могут быть самые разные. Итак:
0.Отключаете все оборудование от платы кролика.
1. Выдергиваете балансирный разъем - он уже Вам не пригодится в данном состоянии платы. Я тоже не использую контроль батареи. Лучше отдельно на батарею пищалку поставить, а лучше - засечь по таймеру время полета на батарее и не доводить до писка датчика.
2. Берете отдельный ВЕС.
На ВЕСе проверяете - установлена ли перемычка на выдачу 5 вольт(кролику нужно 5 вольт). Запитываете его от 12-вольтового акка(любого).
3. ВНИМАНИЕ! Подача питания таким образом может "допалить" Вашего кролика. Ведь неизвестны последствия от предыдущего замыкания. А может - все пройдет и нормально. Это Ваш риск.
Втыкаете контакты с ВЕСа в кролика, учитывая полярность(ОЧЕНЬ ВНИМАТЕЛЬНО!!!) Если светодиоды вверху, то минус(земля, GND) - внизу. Плюс - в середине. Воткнуть можно(ВНИМАНИЕ!!!!) либо в разъемы для входов с приемника, либо на разъемы выходов на двигатели и сервы. Это два длинных ряда разъемов справа и слева(каждый на 8 каналов).
4.Если воткнули питание и у Вас ничего не бахнуло, а только заморгали светодиоды туда-сюда, то кролик еще живой.
5.Теперь втыкайте ЮСБ шнурок в комп и в кролика.
6.Смотрите - определяется или нет и не горит ли USBпорт компа.
7.Если определился и USB на компе не сгорел - запускаете программу настройки кроля, выбираете необходимый ком-порт и уже занимаетесь настройкой/прошивкой.
Отпишитесь о результатах эксперимента.
..! You Can Make World Better !..
Последнее редактирование: 19 сен 2012 13:20 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
 Автор темы
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-

- Небесный тихоход
19 сен 2012 13:20 #5071
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
При подключении либо через бек либо через юсб, светодиоды еле еле светятся, но не бегают, комп не определяет.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
19 сен 2012 13:29 #5072
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Тогда попробуем идентифицировать сгоревшую деталь. Может, где-то у нас можно купить.
Нужно перепаять.
Но поскольку Вы собираетесь на коптер вешать вероятно недешевую камеру(для съемок панорам), то я бы на Вашем месте - просто заказал отдельную плату кролика www.goodluckbuy.com/rabbit-flight-contro...on-care-free-cf.html Ведь одной деталью дело может не закончиться, и будет очень обидно из-за глюка платы потерять дорогостоящее оборудование.
Нужно перепаять.
Но поскольку Вы собираетесь на коптер вешать вероятно недешевую камеру(для съемок панорам), то я бы на Вашем месте - просто заказал отдельную плату кролика www.goodluckbuy.com/rabbit-flight-contro...on-care-free-cf.html Ведь одной деталью дело может не закончиться, и будет очень обидно из-за глюка платы потерять дорогостоящее оборудование.
..! You Can Make World Better !..
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
19 сен 2012 13:33 #5073
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Тогда мне нужно помощь по заказу, так как там оплата через палку а её у меня нет , то я не могу заказать. Если есть возможность как то помочь то помогите с заказом.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
19 сен 2012 13:45 #5074
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
В личке.
..! You Can Make World Better !..
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 21:11 - 20 сен 2012 22:02 #5075
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Следующие три видео, возможно, стоит даже считать рекламой кролику - rabbit flight controller-у....
Сверхстабильность.... на этих двух. Я бросил курить, поэтому на ролике - не закуриваю. Следовательно, рекламодатели сигарет - курят(проходят мимо)....") Я - за здоровый образ жизни!!!! (Вот бы еще спортом заняться и похудеть...
Я - за здоровый образ жизни!!!! (Вот бы еще спортом заняться и похудеть...  )
)
Полет по камере - на этом. В процессе полета по камере был задействован режим удержания по высоте, так как пилот летел в первый раз и навыки полетов еще не развиты на должном уровне. Тем не менее - в конце ролика он в ручном режиме смог вытянуть коптер и посадить его. Смотрим.
Сверхстабильность.... на этих двух. Я бросил курить, поэтому на ролике - не закуриваю. Следовательно, рекламодатели сигарет - курят(проходят мимо)....
Полет по камере - на этом. В процессе полета по камере был задействован режим удержания по высоте, так как пилот летел в первый раз и навыки полетов еще не развиты на должном уровне. Тем не менее - в конце ролика он в ручном режиме смог вытянуть коптер и посадить его. Смотрим.
..! You Can Make World Better !..
Последнее редактирование: 20 сен 2012 22:02 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 21:39 - 20 сен 2012 21:59 #5076
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Новая прошивка для кроля
www.rcgroups.com/forums/attachment.php?attachmentid=5170474
www.rcgroups.com/forums/attachment.php?attachmentid=5170474
Это, собственно, авто-гугл-перевод с инглиша вот этогоНовое обновление было сделано сегодня вечером.
они многое изменить в прошивке и программное обеспечение ПК.
1. изменить ПК с графическим интерфейсом
2. Добавлено отображение долготы и широты GPS в GUI
3. Можно изменить скорость РУТ
4. добавить параметр для настройки GPS удержания позиции.
5.fix ошибка для барометра и ультразвуковой проблемы переключатель датчика
6. 7-канальный изменения в 3-позиционный переключатель и добавить 8-канальный переключатель
7. серво выход добавить 400Гц
8. Можно использовать газ для калибровки ESC и других параметров при включении питания.
9. добавить Z оси Gimble управления
10. добавить 3 оси центра pooint настроить и отрегулировать путешествовать.
11. при мощности до Gimble находится в действии не нужно руке.
12. 3 оси может ручного управления для Gimble.
13 отказоустойчивая переход на 5 канале.
14. Монитор аккумулятора uplimited установлен в 4V
15. настройки параметров для Smart 3D.
Вы можете изменить английского внутри GUI. на подъеме правой стороне GUI
The new update was out tonight.
they change a lot inside the firmware and the PC software.
1. modify the PC tool GUI
2. added display the GPS longitude and latitude in the GUI
3. can modify the speed of RTH
4. add the parameter for adjust the GPS position hold.
5.fix the bug for barometer and ultrasonic sensor switch problem
6. 7 channel change to 3 position switch and add 8 channel switch
7. servo output add 400hz
8. can use throttle to calibrate the ESC and other parameter during power up.
9. add Z axis gimble control
10. add 3 axis center pooint adjust and travel adjust.
11. when power up the gimble is in action no need to arm.
12. 3 axis can manual control for gimble.
13 fail-safe move to 5 channel.
14. battery monitor uplimited set to 4V
15. adjust the parameter for Smart 3D.
you can change English inside the GUI. on the up right side of the gui
..! You Can Make World Better !..
Последнее редактирование: 20 сен 2012 21:59 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 23:05 - 20 сен 2012 23:12 #5077
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Мего стабильность,Жпс или нет. Для сьёмки панорам то что надо завис и снимай себе. Надеюсь когда закажу себе нового поможете с настройками чтоб опять не спалить
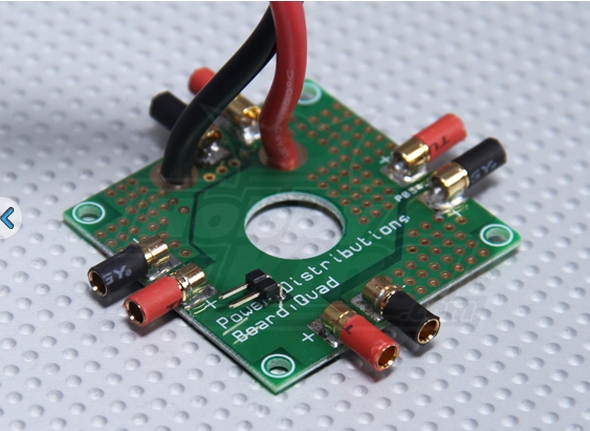
Да еще хотел спросить, плата питания такая пойдёт или лучше провода в кучу спаять ?
Да еще хотел спросить, плата питания такая пойдёт или лучше провода в кучу спаять ?
Последнее редактирование: 20 сен 2012 23:12 пользователем sneg555.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
20 сен 2012 23:11 - 20 сен 2012 23:20 #5078
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Я пользую аналогичную этой

Никаких контактов и разъемов - только пайка!
В видео(первых двух) использовалась функция удержания высоты и координаты(по GPS).
Никаких контактов и разъемов - только пайка!
В видео(первых двух) использовалась функция удержания высоты и координаты(по GPS).
..! You Can Make World Better !..
Последнее редактирование: 20 сен 2012 23:20 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 23:18 - 25 сен 2012 22:28 #5079
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Добавлена новая функция - фаил-сафе(Failsafe)
..! You Can Make World Better !..
Последнее редактирование: 25 сен 2012 22:28 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 23:19 #5080
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Много повторов аж глаза заболели читать
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
20 сен 2012 23:21 - 20 сен 2012 23:22 #5081
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Знаю. Что гугл выдал - то и вставил. Это я часть повторов уже убрал. Но надо закругляться на сегодня, поэтому не доделал до конца.
..! You Can Make World Better !..
Последнее редактирование: 20 сен 2012 23:22 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
20 сен 2012 23:52 - 20 сен 2012 23:54 #5082
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
а что насчет
Такой
платы ?
Последнее редактирование: 20 сен 2012 23:54 пользователем sneg555.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
21 сен 2012 09:19 #5084
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Тема про кролика а не про Мультивий. Купите Мультивий - сделаете тему про него.
..! You Can Make World Better !..
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
21 сен 2012 21:01 - 21 сен 2012 21:18 #5086
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
У товарища Alex-a сегодня его гекса ушла в сторону запада на полном форсаже. И не вернулась.. 
Поехал он летануть без меня, говорит, что поднял метров на 20 и переключил в режим удержания высоты(вчера он так летал). Коптер вместо удержания высоты начал ее набирать с креном. Переключение режимов ничего не дало и коптер за 700 уев общей стоимостью - умчал в сторону западной границы Украины. Видно, полетел в Европу. Уже коптеры у нас не выдерживают. До этого - Скайвокер(планер) в режиме РТН стремился на запад, теперь - коптер... Обидно.
Читал темы и понял, что причин подобного "улета" может быть миллион - от неправильно включенного питания, дребезга контактов до недостаточного количества спутников. Такие дела.
А там на 10-12-16 минут полета - новенькие акки 5200 desire-power стояли. Так что километров на 10 он мог упереть... И маяка на нем не было.
Сегодня я со своим коптером эксперименты проводил, так уже, что называется, начал "очковать"
Перепрошился на 218. НЕ понравилось.
Коптер на стоке - стал дерганый, перестал нормально работать сонар. Координату удерживал, домой - ехал, но почему-то при включении этих режимов - просаживался до 3-х метров по высоте и потом уже выполнял команду. Высоту начинал держать при включении на высоте от 5 метров и выше. При включении ниже - спускался до 50 см. полный бред.
Видео
Начал откатываться на 12-ю прошивку - вроде без перемычки прошился и заново перекалибровал все. Полетел, а коптер выполняет функции так, как будто я не прошивался.
Пришлось перепрошиться с перемычкой - для надежности аж 2 раза .
Стемнело, поэтому донастроил в гараже и рядом с ним подлетнул. Вроде все ок, проверил пока удержание высоты по сонару, но надо все функции протестить.
Да, очень насторожила функция ФС в 18-й прошивке. Подозреваю, что пока наступит ясность по ее программированию - пара-тройка коптеров покинут своих хозяев. Я полетаю пока на 12-й.
Остальные видео снимал, но у меня ГоПро 1-й версии, поэтому не может снимать нормально в сумерках. Для нее ночь наступает...
Поехал он летануть без меня, говорит, что поднял метров на 20 и переключил в режим удержания высоты(вчера он так летал). Коптер вместо удержания высоты начал ее набирать с креном. Переключение режимов ничего не дало и коптер за 700 уев общей стоимостью - умчал в сторону западной границы Украины. Видно, полетел в Европу. Уже коптеры у нас не выдерживают. До этого - Скайвокер(планер) в режиме РТН стремился на запад, теперь - коптер... Обидно.
Читал темы и понял, что причин подобного "улета" может быть миллион - от неправильно включенного питания, дребезга контактов до недостаточного количества спутников. Такие дела.
А там на 10-12-16 минут полета - новенькие акки 5200 desire-power стояли. Так что километров на 10 он мог упереть... И маяка на нем не было.
Сегодня я со своим коптером эксперименты проводил, так уже, что называется, начал "очковать"
Перепрошился на 218. НЕ понравилось.
Коптер на стоке - стал дерганый, перестал нормально работать сонар. Координату удерживал, домой - ехал, но почему-то при включении этих режимов - просаживался до 3-х метров по высоте и потом уже выполнял команду. Высоту начинал держать при включении на высоте от 5 метров и выше. При включении ниже - спускался до 50 см. полный бред.
Видео
Начал откатываться на 12-ю прошивку - вроде без перемычки прошился и заново перекалибровал все. Полетел, а коптер выполняет функции так, как будто я не прошивался.
Пришлось перепрошиться с перемычкой - для надежности аж 2 раза
Стемнело, поэтому донастроил в гараже и рядом с ним подлетнул. Вроде все ок, проверил пока удержание высоты по сонару, но надо все функции протестить.
Да, очень насторожила функция ФС в 18-й прошивке. Подозреваю, что пока наступит ясность по ее программированию - пара-тройка коптеров покинут своих хозяев. Я полетаю пока на 12-й.
Остальные видео снимал, но у меня ГоПро 1-й версии, поэтому не может снимать нормально в сумерках. Для нее ночь наступает...
..! You Can Make World Better !..
Последнее редактирование: 21 сен 2012 21:18 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
21 сен 2012 22:00 - 21 сен 2012 22:20 #5087
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Если хотите, чтобы все заработало - выполните/проверьте несколько правил по монтажу.
Если хотите, чтобы все заработало - выполните/проверьте несколько правил по монтажу.
1. Удалите плату кроля насколько можно дальше от регуляторов. Опытным путем обнаружено, что расстояние до регов по высоте должно быть не менее 5 см. А там - чем больше - тем лучше.
2. Датчик GPS тоже поднимите хотя бы на пару см(лучше больше) над платой кролика(в случае совмещенного монтажа)
3. Питайте мозг от отдельного(именно отдельного!!) ВЕСа и ВЕС этот от ОТДЕЛЬНОГО 3-баночного акка, а от мозга - питайте сонар и GPS. Именно так, и никак иначе!Это очень мегаважно! Пока я так не сделал - не было "полного ажура". НИкаких БеКОВ от регуляторов - ни в коем случае! Оставить только сигнальный провод и провод земли. Ценральную жилу(плюсовую) от регов - выдернуть!
4. После прошивки со сбросом - откалибруйте горизонт, затем регуляторы, затем компас.
5.Калибруйте компас по "хаотичному методу калибровки" - вращайте во всех осях около 30 секунд, пока не перестанет "трещать"(в идеале) или будет очень редко потрескивать, а потом сделайте три полных оборота в горизонтальной оси и поставьте на землю. Когда пикнет и "задышит" - калибровка окончена. Понятно, что лучше калибровать на улице подальше от сильных магнитных полей.
6.Не закрывайте дырку барометра ватой, поролоном и прочими вещами - я проверял, что это дает только отрицательный результат. Вероятно, крышка на мозги - тоже должна способствовать всяким сквознякам и искуственным перепадам давления под ней. При хорошей погоде и монтаже платы кролика сверху - влияние на баро(без крышки) от винтов - не замечено.
7. Ну, и желательно исключить всякий "дребезг" контактов. Возможно - путем пайки проводов напрямую к выходам.
Если хотите, чтобы все заработало - выполните/проверьте несколько правил по монтажу.
1. Удалите плату кроля насколько можно дальше от регуляторов. Опытным путем обнаружено, что расстояние до регов по высоте должно быть не менее 5 см. А там - чем больше - тем лучше.
2. Датчик GPS тоже поднимите хотя бы на пару см(лучше больше) над платой кролика(в случае совмещенного монтажа)
3. Питайте мозг от отдельного(именно отдельного!!) ВЕСа и ВЕС этот от ОТДЕЛЬНОГО 3-баночного акка, а от мозга - питайте сонар и GPS. Именно так, и никак иначе!Это очень мегаважно! Пока я так не сделал - не было "полного ажура". НИкаких БеКОВ от регуляторов - ни в коем случае! Оставить только сигнальный провод и провод земли. Ценральную жилу(плюсовую) от регов - выдернуть!
4. После прошивки со сбросом - откалибруйте горизонт, затем регуляторы, затем компас.
5.Калибруйте компас по "хаотичному методу калибровки" - вращайте во всех осях около 30 секунд, пока не перестанет "трещать"(в идеале) или будет очень редко потрескивать, а потом сделайте три полных оборота в горизонтальной оси и поставьте на землю. Когда пикнет и "задышит" - калибровка окончена. Понятно, что лучше калибровать на улице подальше от сильных магнитных полей.
6.Не закрывайте дырку барометра ватой, поролоном и прочими вещами - я проверял, что это дает только отрицательный результат. Вероятно, крышка на мозги - тоже должна способствовать всяким сквознякам и искуственным перепадам давления под ней. При хорошей погоде и монтаже платы кролика сверху - влияние на баро(без крышки) от винтов - не замечено.
7. Ну, и желательно исключить всякий "дребезг" контактов. Возможно - путем пайки проводов напрямую к выходам.
..! You Can Make World Better !..
Последнее редактирование: 21 сен 2012 22:20 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
21 сен 2012 22:53 #5088
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Да, тоже очень важно: Горизонт калибруйте с помощью вот таких(или аналогичных) "пипок"
 www.hobbyking.com/hobbyking/store/uh_vie....asp?idProduct=10614
www.hobbyking.com/hobbyking/store/uh_vie....asp?idProduct=10614
Внимание! Этот левеллер нужно размещать на плоскости лучей(куда они прикручены), а не на плоскости платы кролика. И по нему выставить коптер в горизонт. Так получите максимальную точность.
Внимание! Этот левеллер нужно размещать на плоскости лучей(куда они прикручены), а не на плоскости платы кролика. И по нему выставить коптер в горизонт. Так получите максимальную точность.
..! You Can Make World Better !..
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
22 сен 2012 16:59 #5089
от sneg555
sneg555 ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
sphere_kev в личку
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sneg555
-
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK4
-
Меньше
Больше
- Сообщений: 120
- Спасибо получено: 0
25 сен 2012 22:21 - 25 сен 2012 22:26 #5104
от sphere_kev
..! You Can Make World Better !..
sphere_kev ответил в теме Rabbit - система управления и стабилизации - тестим Кролика.
Чей-то китайцы расплодились на прошивки.
Вышла 219-я www.rcgroups.com/forums/showpost.php?p=22829657&postcount=7159
Видать, за 218-им юзеры "навтыкали"
Новое
1-Add the Edit option for IRRET_Shape
2-Add the options (check box) for receiver ch. reverse 1 to 4...
3-Voltage Alarm setup GUI is OK
4-Add the slider for delay of auto power off
Баги 218- вероятно, забыли исправить. По крайней мере об этом - молчек.
Прямая ссылка на файл с прошивкой
Вышла 219-я www.rcgroups.com/forums/showpost.php?p=22829657&postcount=7159
Видать, за 218-им юзеры "навтыкали"
Новое
1-Add the Edit option for IRRET_Shape
2-Add the options (check box) for receiver ch. reverse 1 to 4...
3-Voltage Alarm setup GUI is OK
4-Add the slider for delay of auto power off
Баги 218- вероятно, забыли исправить.
Прямая ссылка на файл с прошивкой
..! You Can Make World Better !..
Последнее редактирование: 25 сен 2012 22:26 пользователем sphere_kev.
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
- sphere_kev
-
Автор темы
- Не в сети
- COM_KUNENA_SAMPLEDATA_RANK_MODERATOR
-
- Небесный тихоход
Время создания страницы: 0.550 секунд